Nomad
Nomad Autoscaler Concepts
This section covers concepts of the Nomad Autoscaler and explains the technical details of how it functions, its architecture, and sub-systems.
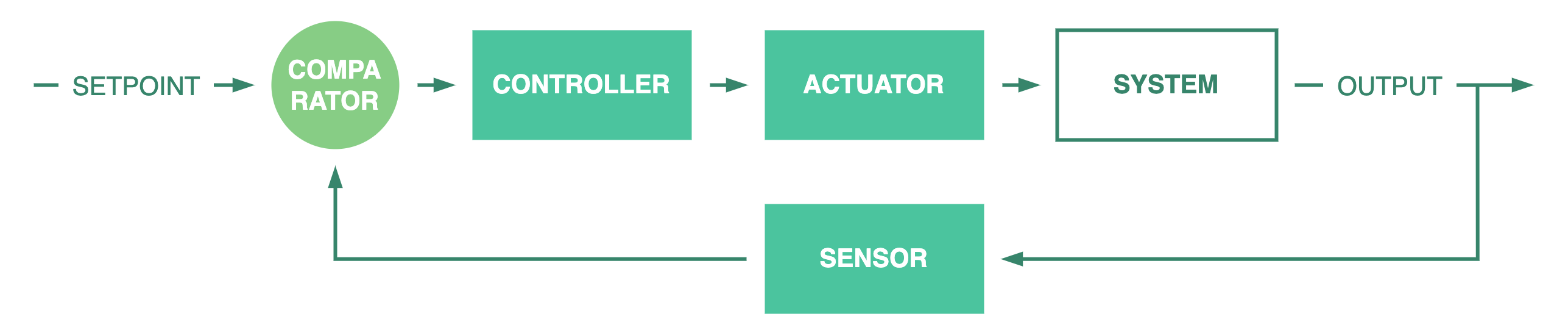
The Nomad Autoscaler is modeled around the concept of a closed-loop control system. These types of systems are often at the core of self-regulating mechanisms because they are able to adjust some value based on the current state of the system and some user provided configuration. An example of a closed-loop control system is a thermostat, where you set the desired temperature and the appliance will regulate the output of cold and hot air to make sure the room stays at the value set.
In closed-loop systems there are a few key components:
- Setpoint is the desired output as defined by the user.
- Comparator computes the difference between the setpoint and current state of the system.
- Controller connects all the components together and defines what needs to be done to bring the system closer to the desired state.
- Actuator applies the changes defined by the controller.
- System is the entity being controlled.
- Output is the current value of the system.
- Sensor reads the system output and translates it to a value that can be used by the controller.
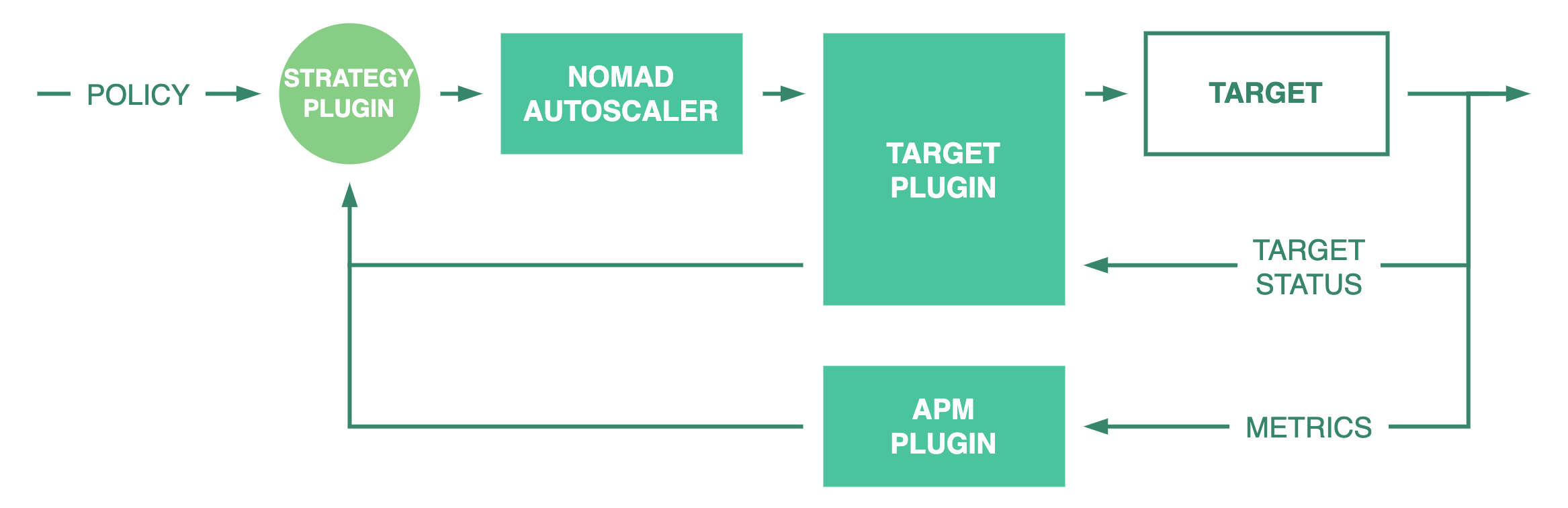
The Nomad Autoscaler follows this same base architecture and offloads some of the components to different types of plugins.
- The autoscaling policy is how users define their desired outcome and control the Nomad Autoscaler.
- Target is what users want to scale. It can be a job group, where the number of allocations is scaled, or a set of Nomad clients, where the number of nodes is what changes.
- Strategy plugins receive the current status of the scaling target (such as the number of allocations of a group) and metrics of the system to compute what actions need to be taken.
- Target plugins communicate with targets to both read its status and to apply changes defined by the Autoscaler.
- APM plugins read application performance metrics from external sources.